IBC:隐式行为克隆
IBC(Implicit Behavior Cloning)在原理上很简单,就是把行为克隆视作基于能量建模的问题。在推理阶段执行通过采样或梯度下降寻找最优动作$\hat{\mathbf{a}}$的方式执行隐式回归,可见式(1)。
$$ \begin{aligned} \hat{\mathbf{a}}=\underset{\mathbf{a}\in\mathcal{A}}{argmin}\quad E_{\theta}(\mathbf{o},\mathbf{a}) \end{aligned}\tag{1} $$
实验结果表明,行为克隆由监督学习问题变为基于能量的建模问题,导致机器人完成任务性能得到提升:从双臂把小物品放进容器,到在1mm容忍度内精确推动bolcks,再到根据颜色分类物品,可见图1所示。IBC不仅能够建模多峰分布,还能够不连续函数。
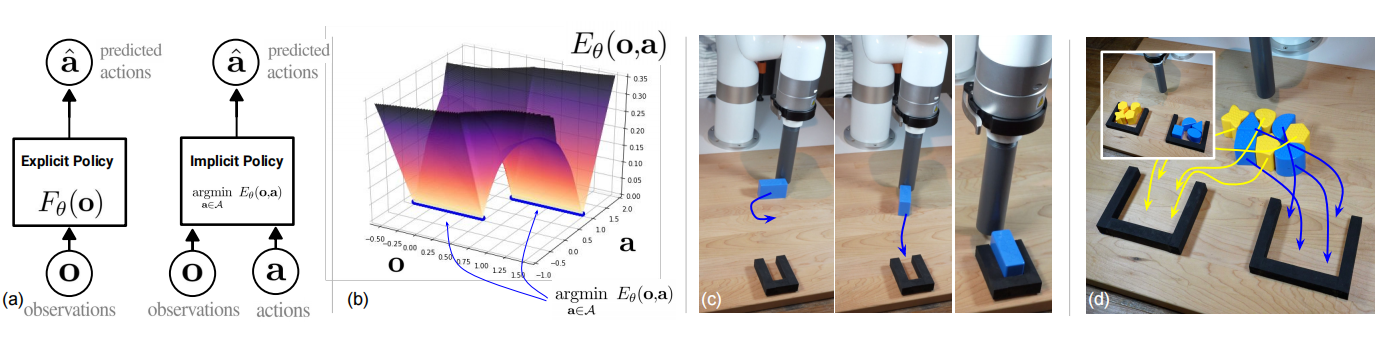
图1 (a)显式策略与隐式策略;(b)能量地图;(c)精确的块嵌入任务;(d)分类任务
隐式模型训练与推理
给定数据集$\{\mathbf{x}_i,\mathbf{y}_i\}$和回归界$\mathbf{y}_{min},\mathbf{y}_{max}\in\mathbb{R}^{m}$,模型训练由生成样本$\mathbf{x}_i$的负样本集合$\{\tilde{\mathbf{y}}_i^j\}_{j=1}^{N_{neg}}$,以及利用InfoNCE作为损失函数构成,可见式(2)所示。
$$ \begin{aligned} \mathbf{\mathcal{L}}_{InfoNCE}=\sum_{i=1}^N -log(\tilde{p}_{\theta}(\mathbf{y}_i\vert\mathbf{x},\{\tilde{y}_i^j\}_{j=1}^{N_{neg}})) \\ \tilde{p}_{\theta}(\mathbf{y}_i\vert\mathbf{x},\{\tilde{y}_i^j\}_{j=1}^{N_{neg}})=\frac{e^{-E_{\theta}(\mathbf{x}_i,\mathbf{y}_i)}}{e^{-E_{\theta}(\mathbf{x}_i,\mathbf{y}_i)}+\sum_{j=1}^{N_{reg}}e^{-E_{\theta}(\mathbf{x}_i,\tilde{y}_i^j)}} \end{aligned}\tag{2} $$
其中,损失函数为$p_{\theta}(\mathbf{y}\vert\mathbf{x})$的负log似然。
能量模型训练之后,隐式推理能够通过随机优化的方式求解$\hat{\mathbf{y}}=argmin_{\mathbf{y}}E_{\theta}(\mathbf{x},\mathbf{y})$。IBC采用了三种训练方式,分别是:基于采样的方式、无倒数优化器的自回归变体、以及基于梯度的朗之万采样,更多的训练方法可见EBMs-Training。
相关思考
能量函数的输入为观测和动作,输出为"能量",那么能量函数可看作观测与动作的匹配程度。若观测与动作越不匹配,那么能量越高;若观测与动作越匹配,那么能量越低。
引用方法
请参考:
li,wanye. "IBC:隐式行为克隆". wyli'Blog (Feb 2024). https://www.robotech.ink/index.php/archives/232.html
或BibTex方式引用:
@online{eaiStar-232,
title={IBC:隐式行为克隆},
author={li,wanye},
year={2024},
month={Feb},
url="https://www.robotech.ink/index.php/archives/232.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接