Constrained RL(一):策略优化理论
在真实世界中,智能体的探索通常有约束的,因为有些行为会产生较大的成本。同时,对于多目标的智能体来说,待满足的目标之间属于冲突的,那么就可以把其转化为有约束的优化问题,从而更好的解决问题。然而,《Constrained Policy Optimization》之前,CRL主要适用于低维空间。那么,CPO提出了什么方法,从而解决高维控制问题呢?
有约束的马尔科夫决策过程
在MDP基础之上,CMDP增加了辅助成本函数集合$C$和限度$d_1,\ldots,d_m$。其中,成本函数集中每个函数$C_i:S\times A\times S\to\mathbb{R}$。若$J_{C_i}(\pi)$表示成本函数$C_i$的平均折扣回报$J_{C_i}(\pi)=\underset{\tau\sim\pi}{E}[\sum_{t=0}^{\infty}\gamma^tC_i(s_t,a_t,s_{t+1})]$,那么CMDP的可行静态策略集合为
$$ \begin{aligned} \Pi_{C}=\{\pi\in\Pi:\forall i,J_{C_{i}}(\pi)\le d_i\} \end{aligned}\tag{1} $$
在CMDP数学模型下,RL的策略优化目标为
$$ \begin{aligned} \pi^{*}=\underset{\pi\in\Pi_{C}}{argmax}J(\pi) \end{aligned}\tag{2} $$
辅助成本函数的价值函数、Q函数、以及优势函数分别表示为$V_{C_i}^{\pi},Q_{C_i}^{\pi},A_{C_i}(\pi)$
策略提升理论
在TRPO算法中,策略优化的目标为
$$ \begin{aligned} \pi_{k+1}=\underset{\pi\in\Pi_{\theta}}{argmax}J(\pi) \\ s.t.~D(\pi,\pi_k)\le\delta \end{aligned}\tag{3} $$
其中,式(3)约束是为了保证策略迭代不发散。
对于有约束的策略优化,不仅要奖励提升,而且满足约束和策略迭代可行的约束。
$$ \begin{aligned} \pi_{k+1}=\underset{\pi\in\Pi_{\theta}}{argmax}J(\pi) \\ s.t. J_{C_{i}}(\pi)\le d_i~i=1,\ldots,m\\ ~D(\pi,\pi_k)\le\delta \end{aligned}\tag{4} $$
在TRPO的通用随机策略单调提升的理论基础上,CPO对Trust Region中两个随机策略之间回报的下界得到了tighten
由
$$ \begin{aligned} \eta(\pi_{new})\ge L_{\pi_{old}}(\pi_{new})-\frac{2\epsilon\gamma}{(1-\gamma)^{2}}\alpha^2 \\ where~\epsilon=\underset{s}{max}\vert\mathbb{E}_{a\sim{\pi}'(a\vert s)}[A_{\pi}(s,a)]\vert \end{aligned}\tag{5} $$
变为
$$ \begin{aligned} J(\pi_{k+1})-J(\pi_{k})\ge\frac{-\sqrt{2\delta}\gamma\epsilon^{\pi_{k+1}}}{(1-\gamma)^2} \\ where~\epsilon^{\pi_{k+1}}=max_{s}\vert E_{a\sim\pi_{k+1}}[A^{\pi_{k}}(s,a)]\vert \end{aligned}\tag{6} $$
该结果有两个优势:
- 有利于tighten理论与实践之间的连接
- CPO可继承TRPO的策略提升表现
有约束的策略优化方法
根据CPO的策略提升理论推导,对于合适的参数$\alpha_k,\beta_k^i$,策略更新
$$ \begin{aligned} \pi_{k+1}=\underset{\pi\in\Pi_{\theta}}{argmax}\underset{\underset{a\sim\pi}{s\sim d^{\pi_{k}}}}{E}[A^{\pi_k}(s,a)-\alpha_k\sqrt{\bar{D}_{KL}(\pi\Vert\pi_k)}] \\ s.t.~J_{C_i}(\pi_k)+\underset{\underset{a\sim\pi}{s\sim d^{\pi_{k}}}}{E}[\frac{A_{C_i}^{\pi_{k}}(s,a)}{1-\gamma}]+\beta_k^{i}\sqrt{\bar{D}_{KL}(\pi\Vert\pi_k)}\le d_i \end{aligned}\tag{7} $$
由于该目标函数下的策略更新较小,为了增大更新步数,利用Trust Region
$$ \begin{aligned} \pi_{k+1}=\underset{\pi\in\Pi_{\theta}}{argmax}\underset{\underset{a\sim\pi}{s\sim d^{\pi_{k}}}}{E}[A^{\pi_k}(s,a)] \\ s.t.~J_{C_i}(\pi_k)+\frac{1}{1-\gamma}\underset{\underset{a\sim\pi}{s\sim d_{\pi_k}}}{E}[A_{C_i}^{\pi_k}(s,a)]\le d_i~\forall i~\bar{D}_{KL}(\pi\Vert\pi_k)\le\delta \end{aligned}\tag{10} $$
对于该策略更新,最坏情况的约束违反,即$\pi_{k+1}$下$C_i$回报的上界为
$$ \begin{aligned} J_{C_i}(\pi_{k+1})\le d_i+\frac{\sqrt{2\delta}\gamma\epsilon^{\pi_{k+1}}_{C_i}}{(1-\gamma)^2} \end{aligned} $$
该上界说明,最坏情况满足约束的策略属于常数量级的次优策略。
实际实现
为了解决近似、采样误差、以及潜在违反问题,通过约束辅助成本的方式进一步约束上界。
对于高维策略参数空间,直接求解式(10)是不实际的。然而,在较小的步长$\delta$下,目标函数和成本可被线形化$\pi_k$而近似,KL-Divergence可被其二阶展开而近似($\pi_k=\pi$下梯度及其本身为$0$)。若目标函数的梯度为$g$、约束$i$的梯度为$b_i$、KL-Divergence的Hessian矩阵为$H$,且定义$c_i=J_{C_i}(\pi_k)-d_i$,那么式(10)的近似为
$$ \begin{aligned} \theta_{k+1}=\underset{\theta}{argmax}g^{T}(\theta-\theta_k) \\ s.t.~c_i+b_i^T(\theta-\theta_k)\le0~i=1,\ldots,m \\ \frac{1}{2}(\theta-\theta_k)^TH(\theta-\theta_k)\le\delta \end{aligned}\tag{11} $$
由于Fisher信息矩阵$H$总是半正定的,因此在特定情况下该优化问题是凸的,那么对偶问题为
$$ \begin{aligned} \underset{\underset{v\ge0}{\lambda\ge0}}{max}\frac{-1}{2\lambda}(g^TH^{-1}g-2r^T+v^TSv)+v^Tc-\frac{\lambda\delta}{2} \end{aligned}\tag{12} $$
式中$B=[b_1,\ldots,b_m]$且$c=[c_1,\ldots,c_m]^T$,$r=g^TH^{-1}B,S=B^TH^{-1}B$。
若$\lambda^{*},v^{*}$为对偶的解,那么原问题的解为
$$ \begin{aligned} \theta^{*}=\theta_k+\frac{1}{\lambda^{*}}H^{-1}(g-Bv^{*}) \end{aligned}\tag{13} $$
由于近似误差的存在,策略的更新可能不满足约束,那么利用线搜索确保约束的满足。对于高维问题,Hessian矩阵的逆很难计算,因此采用共轭梯度近似计算。
对于非凸且约束条件个数为$1$的情况,可通过简单的减小约束值
$$ \begin{aligned} \theta^{*}=\theta_{k}-\sqrt{\frac{2\delta}{b^{T}H^{-1}b}}H^{-1}b \end{aligned}\tag{14} $$
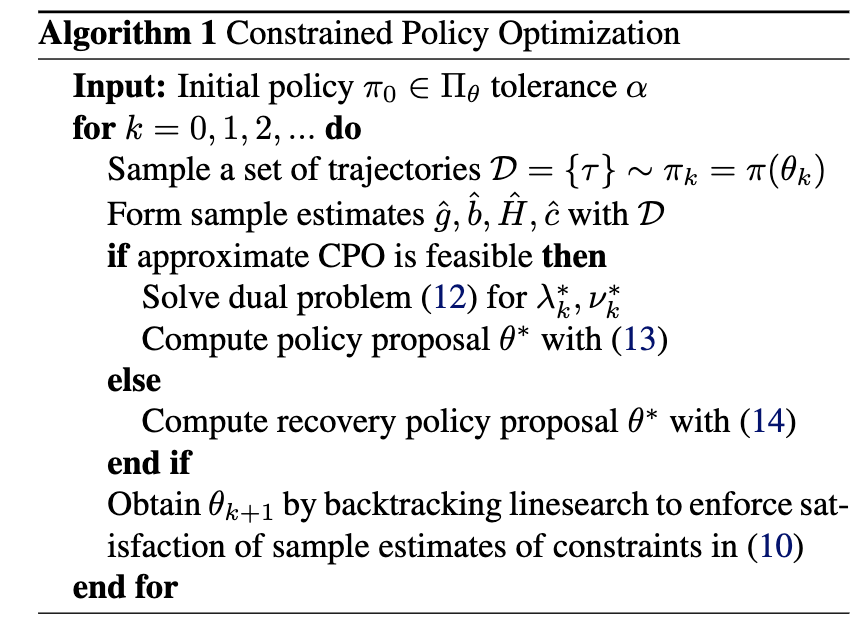
综上所述,CPO算法细节可见算法$1$。
One More Thing
由于式(3)与实际算法之间存在很多近似,因此对原约束施加上界约束,即
$$ \begin{aligned} C_{i}^{+}(s,a,{s}')=C_i(s,a,{s}')+\Delta_i(s,a,{s}') \end{aligned}\tag{15} $$
式中$\Delta_i:S\times A\times S\to\mathbb{R}_{+}$,其表示在固定时间窗口内进入不安装状态的概率。
引用方法
请参考:
li,wanye. "Constrained RL(一):策略优化理论". wyli'Blog (Jul 2025). https://www.robotech.ink/index.php/archives/753.html
或BibTex方式引用:
@online{eaiStar-753,
title={Constrained RL(一):策略优化理论},
author={li,wanye},
year={2025},
month={Jul},
url="https://www.robotech.ink/index.php/archives/753.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接