GAIL:生成式对抗模仿学习
模仿学习主要有两种形式,分别是行为克隆和逆强化学习。其中,行为克隆把学习一个策略视作关于状态-动作的监督学习问题;逆强化学习是先找到专家策略奖励最大的奖励函数,然后基于奖励函数学习出策略。行为克隆算法虽然简单,但是该类算法很容易受到分布偏移造成的复合误差影响。逆强化学习与之相反,不仅需要计算奖励函数,还需要在内循环中进行强化学习,所以计算成本很高。在这样背景下,GAIL作者们期望设计一个算法能够明确告诉智能体如何学习出专家策略,而不需要先寻找奖励函数。
为了设计一个绕过IRL(Inverse Reinforcement Learning)中间步骤的算法,作者们先基于最大化因果熵IRL$[2]$,$[3]$学习出成本函数,再基于RL学习出策略。接下来,提出了一个无模型模仿学习框架,该框架可以绕过寻找奖励函数的步骤。
逆强化学习
给定专家策略$\pi_{E}$,最大化因果熵IRL的目标函数为
$$ \begin{aligned} \underset{c\in\mathcal{C}}{maximize}(\underset{\pi\in\Pi}{min}-H(\pi)+\mathbb{E}_{\pi}[c(s,a)])-\mathbb{E}_{\pi_{E}}[c(s,a)] \end{aligned}\tag{1} $$
式(1)中$H(\pi)\triangleq\mathbb{E}_{\pi}[-log\pi(a\vert s)]$。
根据式(1),可知,最大化因果熵IRL先寻找成本函数$c\in\mathcal{C}$,该成本函数使专家策略成本最低,其它策略成本最高。然后,再通过强化学习找到专家策略
$$ \begin{aligned} RL(c)=\underset{\pi\in\Pi}{argmin}-H(\pi)+\mathbb{E}_{\pi}c(s,a) \end{aligned}\tag{2} $$
寻找最优策略
作者们通过检测成本函数候选集$\mathcal{C}$的容量,研究最优IRL的表达力。由于在大容量成本侯选集中研究,很容易产生过拟合,所以施加了一个凸的正则化器s$\psi:\mathbb{R}^{\mathcal{S}\times\mathcal{A}}\to\bar{\mathbb{R}}$,可见式(3)
$$ \begin{aligned} IRL_{\psi}(\pi_E)=\underset{c\in\mathbb{R}^{\mathcal{S}\times\mathcal{A}}}{argmax}-\psi(c)+(\min_{\pi\in\Pi}-H(\pi)+\mathbb{E}_{\pi}[c(s,a)])-\mathbb{E}_{\pi_E}[c(s,a)] \end{aligned}\tag{3} $$
为了研究$RL(\tilde{c})$产生的策略,先定义策略$\pi\in\Pi$的占用度量$\rho_{\pi}:\mathcal{S}\times\mathcal{A}\to\mathbb{R}$为$\rho_{\pi}(s,a)=\pi(s,a)\sum_{t=0}^{\infty}\gamma^tP(s_t=s\vert\pi)$。占用度量可被解释为状态-动作对的分布。同时,为了方便表达,占用度量可表达为$\mathbb{E}_{\pi}[c(s,a)]=\sum_{s,a}\rho_{\pi}(s,a)c(s,a)$
根据文献$[4]$,可知,有效占用度量的集合可被表示为仿射约束的可行集:若$p_0(s)$为初始状态的分布,$P({s}'\vert s,a)$为环境的动力学模型,那么$\mathcal{D}=\{\rho:rho\ge0\quad and\quad \sum_{a}\rho(s,a)=\rho_0(s)+\gamma\sum_{{s}',a}P(s\vert{s}',a)\rho({s}',a)\quad \forall s\in\mathcal{S}\}$。同时,策略$\Pi$与$\mathcal{D}$属于一对一的对应关系。根据以上数学关系,可得:
命题1:*若$\rho\in\mathcal{D}$,那么$\rho$式策略$\pi_{\rho}(a\vert s)\triangleq\frac{\rho(s,a)}{\sum_{{a}'}\rho(s,{a}')}$,且$\pi_{\rho}$为占用度量$\rho$的唯一策略。
为了进一步研究,需要的工具:对于函数$f:\mathbb{R}^{\mathcal{S}\times\mathcal{A}}\to\bar{\mathbb{R}}$,对应的凸共轭$f^{*}=sup_{y\in\mathbb{R}^{\mathcal{S}\times\mathcal{A}}}x^Ty-f(y)$
命题2: $RL\circ IRL_{\psi}(\pi_{E})=\underset{\pi\in\Pi}{argmin}-H(\pi)+\psi^*(\rho_{\pi}-\rho_{\pi_E})$。
命题2的证明来源于这样的观察:最优成本函数和策略来源于一个特定函数的鞍点。IRL寻找到鞍点的一个坐标,然后通过RL寻找另一个坐标。
根据命题2可知,$\psi$正则化的IRL隐式的寻找一个策略,该策略的占用度量与专家的占用度量相近,其距离被凸函数$\psi^{*}$所测量。从而,可知,不同的$\psi$会产生不同的模型学习算法。若$\psi$为常数函数,那么可得
推论1:若$\psi$是一个常数函数,$\tilde{c}\in IRL_{\psi}(\pi_E)$,且$\tilde{\pi}\in RL(\tilde{c})$,那么$\rho_{\tilde{\pi}}=\rho_{\pi_E}$。
为了证明推论1,需要一个引理来说明占用度量的因果熵
引理1 :若$\bar{H}(\rho)=-\sum_{s,a}\rho(s,a)\frac{log\rho(s,a)}{\sum_{{a}'}\rho(s,{a}')}$,那么$\bar{H}$为严格凹的。同时对于$\forall \pi\in\Pi,\rho\in\mathcal{D}$,可得$H(\pi)=\bar{H}(\rho_{\pi})$且$\bar{H}(\rho)=H(\rho_{\pi_{\rho}})$。
推论1的证明:
定义$\bar{L}(\rho,c)=-\bar{H}(\rho)+\sum_{s,a}c(s,a)(\rho(s,a)-\rho_E(s,a))$。对于常量函数$\psi$,根据引理2可得
$$ \begin{aligned} \tilde{c}\in IRL_{\psi}(\pi_E) &= \underset{c\in\mathbb{R}^{\mathcal{S}\times\mathcal{A}}}{argmax}\quad\underset{\pi\in\Pi}{min}-H(\pi)+\mathbb{E}_{\pi}[c(s,a)]-\mathbb{E}_{\pi_E}[c(s,a)+const] \\ &= \underset{c\in\mathbb{R}^{\mathcal{S}\times\mathcal{A}}}{argmax}\quad\underset{\rho\in\mathcal{D}}{min}-\bar{H}(\rho)+\sum_{s,a}\rho(s,a)c(s,a)-\sum_{s,a}\rho_{E}(s,a)c(s,a) \\ &=\underset{c\in\mathbb{R}^{\mathcal{S}\times\mathcal{A}}}{argmax}\quad\underset{\rho\in\mathcal{D}}{min}\bar{L}(\rho,c) \end{aligned}\tag{4} $$
那么,该优化问题的对偶问题为
$$ \begin{aligned} \underset{\rho\in\mathcal{D}}{minimize}-\bar{H}(\rho) \\ subject\quad to\quad \rho(s,a)=\rho_E(s,a)\quad\forall s\in\mathcal{S},a\in\mathcal{A} \end{aligned}\tag{5} $$
由此可知,对于拉格朗日函数$\bar{L}$,成本函数$c(s,a)$为等式约束的对偶变量。因此,对于式(5)$\tilde{c}$为对偶最优。由于$\mathcal{D}$为凸集且$-\bar{H}$为凸函数,那么强对偶存在。此外,根据引理1保证$-\bar{H}$严格凸,那么原问题最优可根据$\tilde{\rho}=\underset{\rho\in\mathcal{D}}{argmin}\bar{L}(\rho,\tilde{c})=\underset{\rho\in\mathcal{D}}{argmin}-\bar{H}(\rho)+\sum_{s,a}\tilde{c}(s,a)\rho(s,a)=\rho_E$求解对偶唯一最优得到。上式中第一个等式表明$\tilde{\rho}$为$\bar{L}(\cdot,\tilde{c})$的唯一最小,第三个等式是根据原问题(5)的约束得到。由此,推论1得证。
由此,可得如下结论:
- IRL是一个占用度量匹配问题的对偶问题。
- IRL得到求解的最优问题为原问题的最优。
生成式对抗模仿学习
根据推论1可知,若$\psi$为常数,那么产生的最优问题仅在专家所有状态和动作上匹配占用度量。然而,这种算法实际上不实用。实际中,专家轨迹只能提供有限的样本集,所以在大的环境中专家的占用度量值为0,从而使学习到的策略由于缺乏数据不会访问未见过的状态-动作对。此外,基于函数近似器的优化问题,产生与$\mathcal{S}\times\mathcal{A}$对一样多的约束,从而求解难度越大。
那么根据命题2,对优化问题(5)进行松弛
$$ \begin{aligned} \underset{\pi}{minimize}\quad d_{\psi}(\rho_{\pi},\rho_E)-H(\pi) \end{aligned}\tag{6} $$
为了设计出能够绕过IRL中间步骤且适用于复杂环境的模仿学习,文献$[1]$利用式(7)作为成本函数$c(s,a)$的正则化函数。
$$ \psi_{GA}(c)=\begin{cases} \mathbb{E}_{\pi_E}[g(c(s,a))] \quad if\quad c\lt 0\\\\ +\infty\quad otherwise \end{cases}\tag{7} $$
$$ g(x)=\begin{cases}-x-log(1-e^x)\quad if \quad x\lt 0\\\\ +\infty\quad otherwise\end{cases}\tag{8} $$
其对偶表示形式为式(9)
$$ \begin{aligned} \psi_{GA}^*(\rho_{\pi}-\rho_{\pi_E})=\underset{D\in(0,1)^{\mathcal{S}\times\mathcal{A}}}{max}\mathbb{E}_{\pi}[log(D(s,a))]+\mathbb{E}_{\pi_E}[log(1-D(s,a))] \end{aligned}\tag{9} $$
式(9)实际上是二分类问题的损失函数。其中,$D:\mathcal{S}\times\mathcal{A}\to(0,1)$为区分专家策略下的$(s,a)$与智能体策略下的$(s,a)$的分类器。GAN论文中表明最优损失函数为Jensen-Shannon Divergence:$D_{JS}(\rho_{\pi},\rho_{\pi_E})\triangleq D_{KL}(\rho_{\pi}\Vert\frac{\rho_{\pi}+\rho_{E}}{2})+D_{KL}(\rho_E\Vert\frac{\rho_{\pi}+\rho_E}{2})$。若把熵$H$视为策略的正则化器,那么新的模仿学习算法为
$$ \begin{aligned} \underset{\pi}{minimize}\psi^{*}_{GA}(\rho_{\pi}-\rho_{\pi_E})-\lambda H(\pi)=D_{JS}(\rho_{\pi},\rho_{\pi_E})-\lambda H(\pi) \end{aligned}\tag{10} $$
由此,GAIL算法的目标函数为
$$ \begin{aligned} \underset{\pi}{minimize}\underset{D\in(0,1)^{\mathcal{S}\times\mathcal{A}}}{max}(\mathbb{E}_{\pi}[log(D(s,a))]+\mathbb{E}_{\pi_E}[log(1-D(s,a))])-\lambda H(\pi) \end{aligned}\tag{11} $$
如图1所示,GAIL算法伪代码
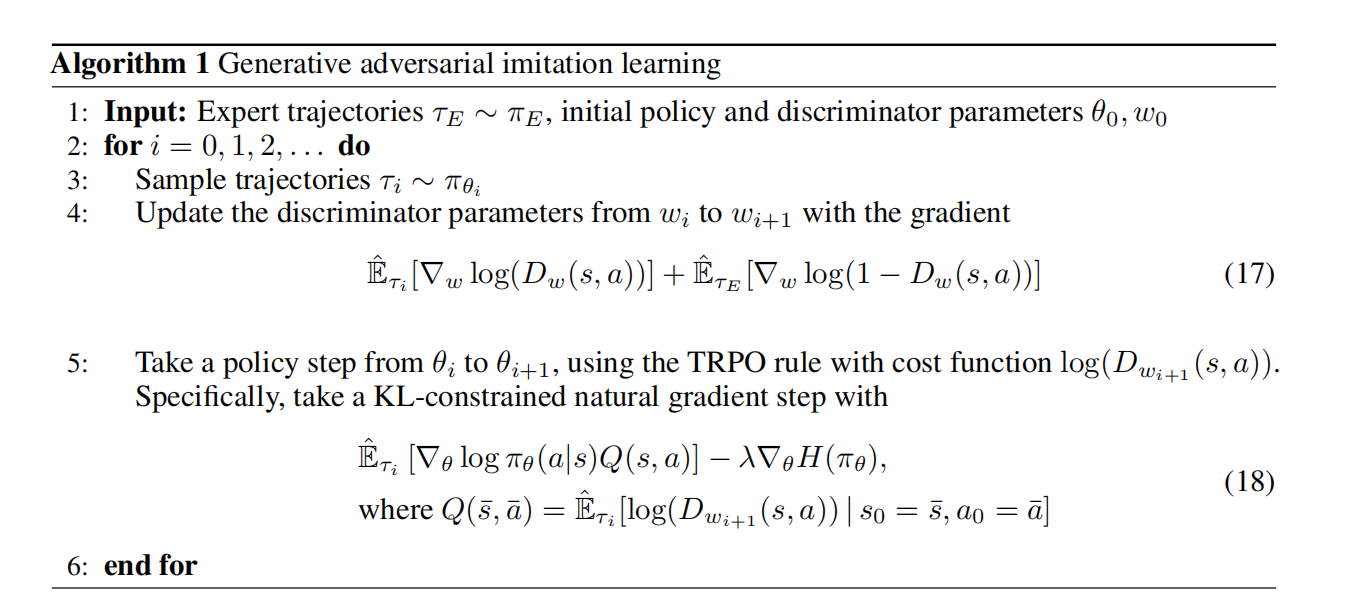
plus:GAIL算法虽然属于模仿学习算法,但是智能体的策略是基于RL算法学习得到的。
参考文献
$[1]$ Ho J, Ermon S. Generative adversarial imitation learning$[J]$. Advances in neural information processing systems, 2016, 29.
$[2]$ Ziebart B D, Maas A L, Bagnell J A, et al. Maximum entropy inverse reinforcement learning$[C]$//Aaai. 2008, 8: 1433-1438.
$[3]$ Ziebart B D, Bagnell J A, Dey A K. Modeling interaction via the principle of maximum causal entropy$[J]$. 2010.
$[4]$ Puterman M L. Markov decision processes: discrete stochastic dynamic programming$[M]$. John Wiley & Sons, 2014.
$[5]$ Goodfellow I, Pouget-Abadie J, Mirza M, et al. Generative adversarial nets$[J]$. Advances in neural information processing systems, 2014, 27.
引用方法
请参考:
li,wanye. "GAIL:生成式对抗模仿学习". wyli'Blog (Feb 2024). https://www.robotech.ink/index.php/archives/187.html
或BibTex方式引用:
@online{eaiStar-187,
title={GAIL:生成式对抗模仿学习},
author={li,wanye},
year={2024},
month={Feb},
url="https://www.robotech.ink/index.php/archives/187.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接