ALOHA2:一个增强的双臂操作低成本硬件
与ALOHA相比,ALOHA2拥有更强的表现、更友好的人体工程学、以及更强的鲁棒性。同时,作者们还开源它的MuJoCo模型。如图1所示,ALOHA2拥有重力补偿,重新设计了leader与follower夹抓。ALOHA2的提升主要关注的方面为:
- 性能与任务范围:通过提升夹抓与控制器等关键元件,从而提升ALOHA性能,以适用于更广泛的操作任务。
- 用户友好性与人体工程学:为了优化大规模的数据收集,优化用户体验与舒适性。这需要提升面向用户系统的响应性与人体工学设计。
- 鲁棒性:为了最小化诊断与修复造成的停机时间增强系统的鲁棒性,简化了机械设计与确保整体维护的容易程度。
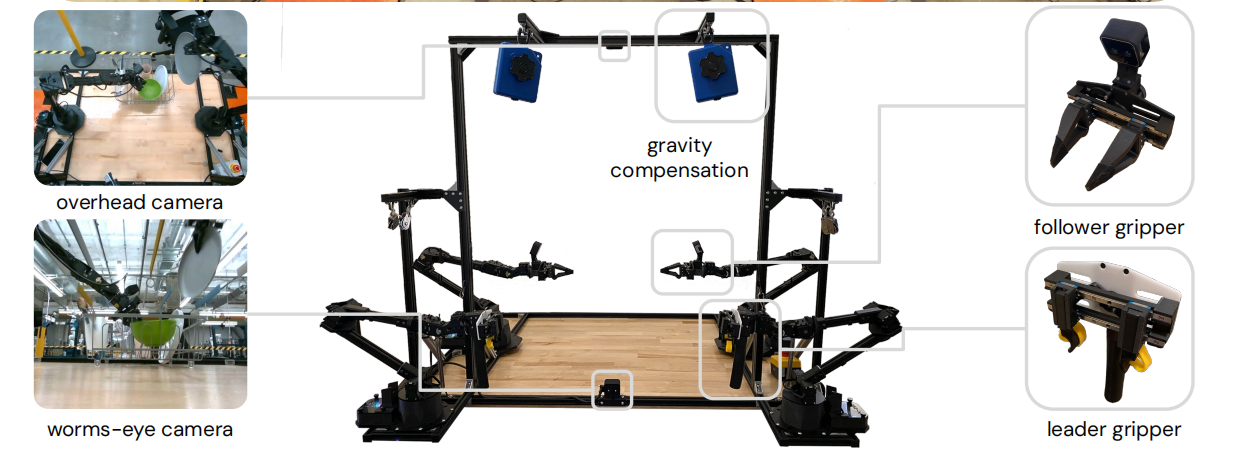
图1 ALOHA2的详细图片描述
最终,作者们做出了如下确切的提升:
- 夹抓:创建了低摩擦的轨道设计,从而提升leader与follower夹抓。对于leader机器人,这提升了远程操作的人体工学与响应性。对于follower,这提升了延时与夹抓输出的力。除此之外,作者们还升级了夹抓手指上胶带材料,从而提升延时与抓取小物品的能力。
- 重力补偿:创建了一个被动重力补偿机制,该机制利用了开箱即用的元件,从而提升了ALOHA原始橡胶带系统的延时性。
- 框架:简化了工作空间周围的框架,同时保持了相机的刚性。这些变化增加了人机交互合作的空间。
- 相机:使用了更小的Intel RealSense D405相机,定制了3D打印相机固定装置,从而减少了follower机械臂的足迹,从而减少抑制操作任务。与原始消费级webcams相机相比,该相机拥有更大的视角、提供了深度信息、拥有全局快门,且允许定制。
- 仿真:在MuJoCo模型建模了ALOHA2的精确说明,从而允许在仿真环境中提升数据收集、策略学习、以及评估。
这些提升使远程操作挑战任务变得更容易,例如:叠T-shirt、打结、扔物品、或低容度的工业级任务。这些提升使机器人收集任务的演示数据变得更容易。
引用方法
请参考:
li,wanye. "ALOHA2:一个增强的双臂操作低成本硬件". wyli'Blog (Apr 2024). https://www.robotech.ink/index.php/archives/457.html
或BibTex方式引用:
@online{eaiStar-457,
title={ALOHA2:一个增强的双臂操作低成本硬件},
author={li,wanye},
year={2024},
month={Apr},
url="https://www.robotech.ink/index.php/archives/457.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接