浅谈状态空间模型SSM基础理论
状态空间模型是一个描绘系统随时间变化的动态行为,被广泛应用在控制理论、机器人、以及经济学。状态空间模型通过一系列隐藏变量,被称为“状态”,高效的捕获时序数据的依赖关系,从而具象化形态的行为。确切的说,状态空间模型由两种方程构成,分别是:状态方程和观测方程,从而构建时刻$t$输入$x(t)\in\mathbb{R}$和输出$y(t)\in\mathbb{R}$的关系。其中,隐藏状态$h(t)\in\mathbb{R}^N$的维度为$N$。
$$ \begin{aligned} {h}'(t)=\mathbf{A}h(t)+\mathbf{B}x(t) \end{aligned}\tag{1} $$
$$ \begin{aligned} y(t)=\mathbf{C}h(t)+\mathbf{D}x(t) \end{aligned}\tag{2} $$
${h}'(t)$为当前状态$h(t)$的导数,$\mathbf{A}\in\mathbb{R}^{N\times N}$为状态转换矩阵,用于状态随时间变化情况;$\mathbf{B}\in\mathbb{R}^{N\times1}$为输入矩阵,控制输入对状态的影响;$\mathbf{C}\in\mathbb{R}^{1\times N}$为输出矩阵,表示基于当前状态产生的输出;$\mathbf{D}$表示命令系数,决定输入对输出产生的直接影响。通常来说,大部分状态空间模型的$\mathbf{D}x(t)=0$,在深度学习可识别为skip连接。
离散化
为了满足各种各样真实世界场景中机器学习的需求,SSMs模型必须要经历离散化过程,把连续参数转换为离散参数。离散化方法通常把连续时间分为$K$个离散化间隔。其中,最有表示性的解决方案是Zero-Order Hold,其假设在间隔$[t_{k-1},t_k]$为常量。在ZOH离散化后,状态空间模型为
$$ \begin{aligned} h_k=\bar{\mathbf{A}}h_{k-1}+\bar{B}x_k \end{aligned}\tag{3} $$
$$ \begin{aligned} y_k=\mathbf{C}h_k \end{aligned}\tag{4} $$
其中,$\bar{\mathbf{A}}=exp(\Delta\mathbf{A})$,$\bar{\mathbf{B}}=(\Delta\mathbf{A})^{-1}(exp(\Delta A)-I)\cdot\Delta\mathbf{B}$,$k$为离散化时间步。由此可见,离散化SSMs与RNN拥有相似结构。因此,与自回归解码的Transformer相比,SSMs的推理很高效。
卷积运算
离散化状态空间模型属于一个线性系统,拥有相关特性,且与卷积运算无缝集成。确切的说,每个时间步可独立的计算输出
$$ \begin{aligned} y_0=\mathbf{C}\bar{\mathbf{A}}^0\bar{\mathbf{B}}x_0 \end{aligned}\tag{5} $$
$$ \begin{aligned} y_1=\mathbf{C}\bar{\mathbf{A}}^1\bar{\mathbf{B}}x_0+\mathbf{C}\bar{\mathbf{A}}^0\bar{\mathbf{B}}x_1 \end{aligned}\tag{6} $$
$$ \begin{aligned} y_2=\mathbf{C}\bar{\mathbf{A}}^2\bar{\mathbf{B}}x_0+\mathbf{C}\bar{\mathbf{A}}^1\bar{\mathbf{B}}x_1+\mathbf{C}\bar{\mathbf{A}}^0\bar{\mathbf{B}}x_2 \end{aligned}\tag{7} $$
$$ \begin{aligned} \cdots \end{aligned}\tag{8} $$
$$ \begin{aligned} y_2=\mathbf{C}\bar{\mathbf{A}}^k\bar{\mathbf{B}}x_0+\mathbf{C}\bar{\mathbf{A}}^{k-1}\bar{\mathbf{B}}x_1+\ldots+\mathbf{C}\bar{\mathbf{A}}^1\bar{\mathbf{B}}x_{k-1}+\mathbf{C}\bar{\mathbf{A}}^0\bar{\mathbf{B}}x_k \end{aligned}\tag{9} $$
通过创建卷积核$\bar{\mathbf{K}}=(\mathbf{C}\bar{\mathbf{B}},\ldots,\mathbf{C}\bar{\mathbf{A}}^{k}\bar{\mathbf{B}},\ldots)$,循环计算可转化为卷积形式
$$ \begin{aligned} y=\mathbf{x}*\mathbf{\bar{K}} \end{aligned}\tag{10} $$
其中,$\mathbf{x}=[x_0,x_1,\ldots]$和$\mathbf{y}=[y_0,y_1,\ldots]\in R^{L}$表示输入和输出序列,$L$为序列长度。卷积运算使SSMs模型可充分利用现代矩阵运算硬件,从而在训练过程中实现并行计算,这对于利用非线性激活函数的RNN不可能。这种情况下给定$D$维输入$x(k)$,SSMs模型独立的计算每一个维度,最终产生$D$维度输出$y(t)$。在这种情况下,输入矩阵、输出矩阵、命令矩阵、以及状态转换矩阵均保持不变。
RNN,Transformer,以及SSM之间的关系
RNN,Transformer,以及SSM之间的关系,可见图2所示。
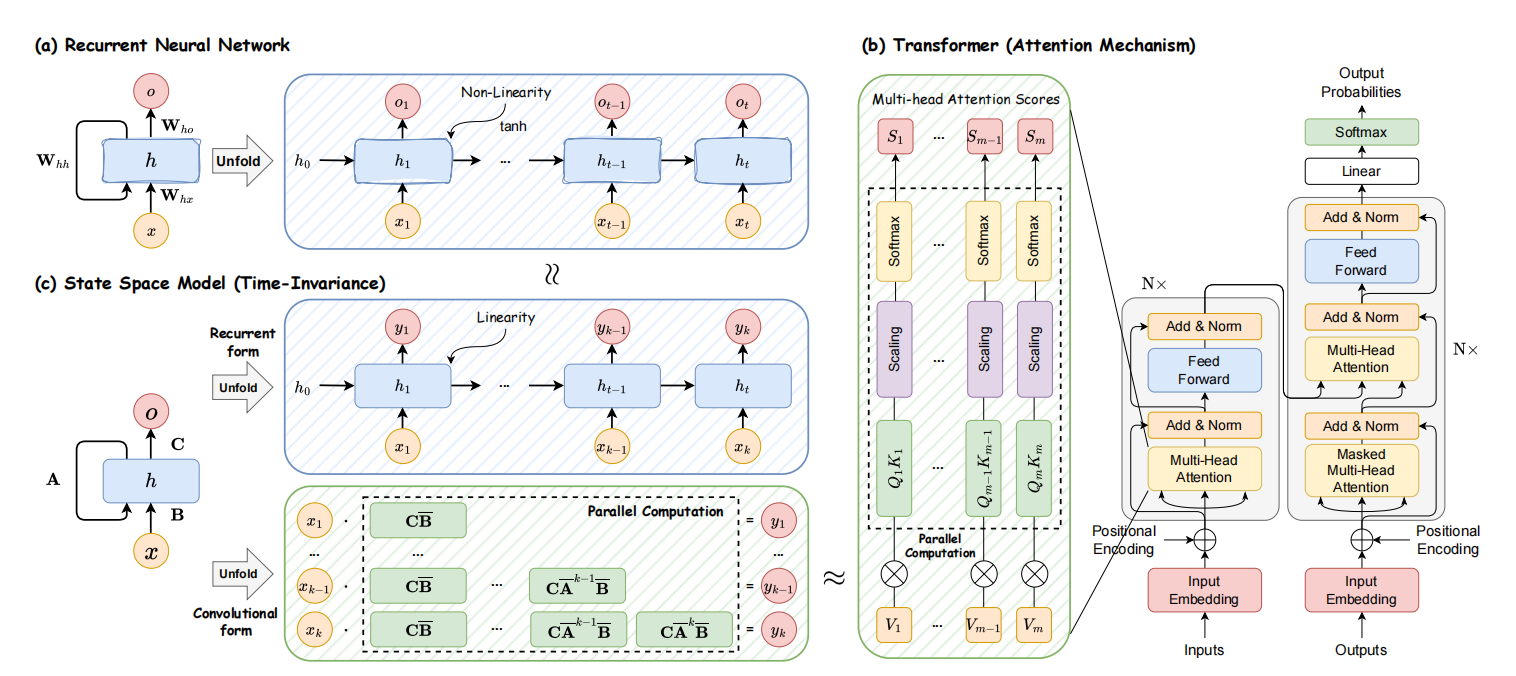
图1 模型架构的描述
RNN在非线形循环框架下计算,且每个计算只取决于之前的隐藏状态和当前输入。虽然这种方式导致RNN可快速的推理,但是阻碍了利用GPU并行计算的能力,即训练缓慢。与之相比,Transformer的推理过程很缓慢。这是因为语言模型的自回归设计导致每个输出的计算,均需要重复计算注意力分数。与RNN和Transformer模型相比,离散化SSMs支持循环运算和卷积运算,即不仅可高效推理也可高效计算。然而,经典的SSMs模型属于时间不变的,即$A,B,C$以及$\Delta$与模型输入无关。这限制了上下文意识的建模,从而导致SSMs在特定任务用于次优表现,例如:选择性复制。
确切的说,状态空间模型模型拥有广泛的意义,只表示具有任何隐式状态的循环过程的概念。在许多学科中,用于指代其它概念,包含马尔可夫决策过程、卡尔曼滤波、动力学因果建模、隐马尔可夫模型、线性动力学系统、以及深度学习中循环神经网络。
引用方法
请参考:
li,wanye. "浅谈状态空间模型SSM基础理论". wyli'Blog (Aug 2024). https://www.robotech.ink/index.php/archives/595.html
或BibTex方式引用:
@online{eaiStar-595,
title={浅谈状态空间模型SSM基础理论},
author={li,wanye},
year={2024},
month={Aug},
url="https://www.robotech.ink/index.php/archives/595.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接