机器人模仿动物的方式学习敏捷技能
基于强化学习范式的足式机器人能够在复杂的领域运动。然而,复杂的行为很难生成。同时,奖励设计和参数调节都需要花费很长的时间设计。
与强化学习相比,模仿学习不需要设计奖励函数,只需要基于参考运动获得期望技能。文献$[1]$基于模仿学习使机器人学习出敏捷的技能,并提出了模仿学习框架,可见图1所示。
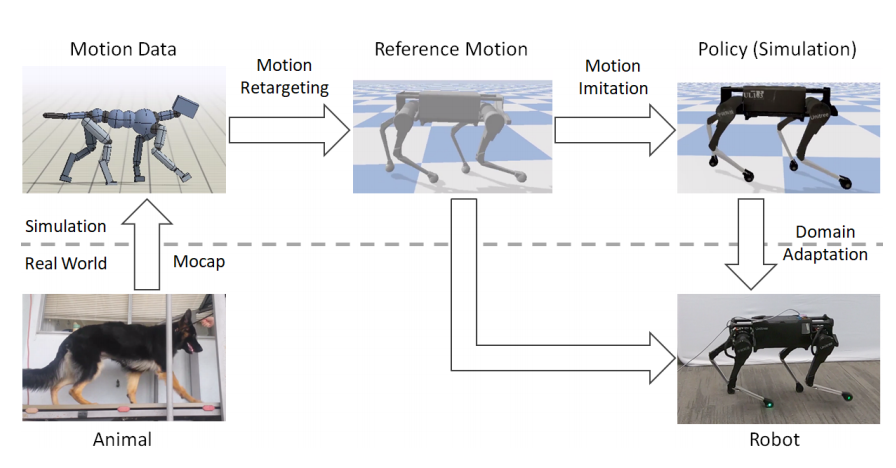
根据图1,可知,该模仿学习框架可分为运动再生成、运动模仿、以及领域自适应。运动在生成阶段,利用逆运动学把原始动物运动形态映射到机器人的形态;运动模仿阶段,在仿真环境中训练策略。同时,引入领域自适应训练模型。
运动再生成
动物的形态与机器人的形态往往是不同的,因此运动数据中动物形态需要与机器人形态对应。首先,把动物身体的关键点与机器人本体关键点对应。然后,确定运动数据中动物身体关键点的位置,再根据机器人姿势确定其关键点的位置。逆运动学被用于构建一系列姿势$\mathbf{q}_{0:T}$用于追踪关键点,对应的优化问题为
$$ \begin{aligned} \underset{\mathbf{q}_{0:T}}{argmin}\sum_t\sum_i\Vert\hat{\mathbf{x}}_i(t)-\mathbf{x}_i(\mathbf{q}_t)\Vert^2+(\bar{\mathbf{q}}-\mathbf{q}_t)^T\mathbf{W}(\bar{\mathbf{q}}-\mathbf{q}_t) \end{aligned}\tag{1} $$
式(1)中正则化项是用于确定姿势与默认姿势$\bar{\mathbf{q}}$尽可能接近,$\mathbf{x}$表示关节位置。
运动模仿
与文献$[2]$中模仿运动方式类似,把模仿学习看成强化学习问题。策略网络的输入由状态$s_t$和目标$g_t$构成。其中,状态$s_t=(\mathbf{q}_{t-2:t},\mathbf{a}_{t-3:t-1})$表示过去3个时间步从IMU读取的本体姿势特征$\mathbf{q}_t$和动作$a_{t}$;目标$g_t=(\hat{\mathbf{q}}_{t+1},\hat{\mathbf{q}}_{t+2},\hat{\mathbf{q}}_{t+10},\hat{\mathbf{q}}_{t+20})$表示未来的目标姿势。与文献$[2]$类似,奖励函数为
$$ \begin{aligned} r_t=w^p+r^p_t+w^vr^v_t+w^er^e_t+w^{rp}r^{rp}_t+w^{rv}+r^{rv}_t \\ w^p=0.5,\quad w^v=0.05,\quad w^e=0.2,\quad w^{rp}=0.15,\quad w^{rv}=0.1 \end{aligned}\tag{2} $$
姿势奖励$r^p_t$鼓励机器人模仿参考运动:$r^p_t=exp[-5\sum_{j}\Vert\hat{\mathbf{q}}_t^j-\mathbf{q}_t^j\Vert^2]$
速度奖励:$r^v_t=exp[-0.1\sum_j\Vert\hat{\dot{\mathbf{q}}}_t^j-\dot{\mathbf{q}}_t^j\Vert^2]$
末端执行器奖励鼓励智能体追踪末端执行器的位置:$r^e_t=exp[-40\sum_e\Vert\hat{\mathbf{x}}_t^e-\mathbf{x}_t^e\Vert^2]$
本体姿势奖励和本体速度奖励均估计模仿本体运动,可见式(3)和(4)
$$ \begin{equation} r_t^{rp}=exp[-20\Vert\hat{\mathbf{x}}_t^{root}-\mathbf{x}_t^{root}\Vert^2-10\Vert\hat{\mathbf{q}}_t^{root}-\mathbf{q}_t^{root}\Vert^2]\tag{3} \end{equation} $$
$$ \begin{equation} r_t^{rv}=exp[-2\Vert\hat{\dot{\mathbf{x}}}_t^{root}-\dot{\mathbf{x}}_t^{root}\Vert^2-0.2\Vert\hat{\dot{\mathbf{q}}}_t^{root}-\dot{\mathbf{q}}_t^{root}\Vert^2]\tag{4} \end{equation} $$
领域自适应
领域自适应的目的是期望不仅学习到鲁棒性高的策略,策略也能随着环境的变化而变化。在每个episode开始,采样动力学参数$\mathbf{\mu}\sim\rho(\mathbf{\mu})$,再被编码器E编码为$\mathbf{z}\sim E(\mathbf{z}\vert\mathbf{\mu})$。策略模型以状态和环境编码为输入,输出动作,即$\pi(\mathbf{a}\vert\mathbf{s},\mathbf{z})$。在把策略迁移到真实世界时,与文献$[3]$相似,先寻找合适的编码$\mathbf{z}^*$使策略成功的执行期望动作。
为了解决策略对动力学参数$\mu$过拟合的问题,编码器中引入了信息瓶颈,目标函数为
$$ \begin{aligned} \underset{\pi,E}{argmax}\quad\mathbb{E}_{\mu\sim\rho(\mu)}\mathbb{E}_{\mathbf{z}\sim E(\mathbf{z}\vert\mathbf{\mu})}\mathbb{E}_{\tau\sim p(\tau\vert\pi,\mu,\mathbf{z})}[\sum_{t=0}^{T-1}\gamma^t r_t] \end{aligned}\tag{5} $$
$$ \begin{aligned} s.t.\quad I(\mathbf{M},\mathbf{Z})\le I_c \end{aligned}\tag{6} $$
计算互信息是不可行的,根据文献$[4]$,可知,式(6)可以利用编码$E$与变分先验$\rho(\mathbf{z})$之间的KL-Divergence被变分上界近似为
$$ \begin{aligned} I(\mathbf{M},\mathbf{Z})\le\mathbb{E}_{\mu\sim\rho({\mu})}[D_{KL}[E(\cdot\vert\mu\Vert \rho(\cdot))]] \end{aligned}\tag{7} $$
那么,目标函数可以被进一步简化为拉格朗日函数
$$ \begin{aligned} \underset{\pi,E}{argmax}\quad\mathbb{E}_{\mu\sim\rho(\mu)}\mathbb{E}_{\mathbf{z}\sim E(\mathbf{z}\vert\mathbf{\mu})}\mathbb{E}_{\tau\sim p(\tau\vert\pi,\mu,\mathbf{z})}[\sum_{t=0}^{T-1}\gamma^tr^t]-\beta\mathbb{E}_{\mu\sim\rho(\mu)}[D_{KL}[E(\cdot\vert\mu\Vert\rho(\cdot))]] \end{aligned}\tag{8} $$
式(8)中编码器被建模为高斯分布$E(\mathbf{z}\vert\mathbf{\mu})=\mathcal{N}(\mathbf{m}(\mu),\Sigma(\mu))$,先验$z$的分布$\rho(\mathbf{z})=\mathcal{N}(0,1)$。由此可见,目标函数可被解释为智能体策略最大化期望回报,同时也依赖最小的信息量适应环境的变化。
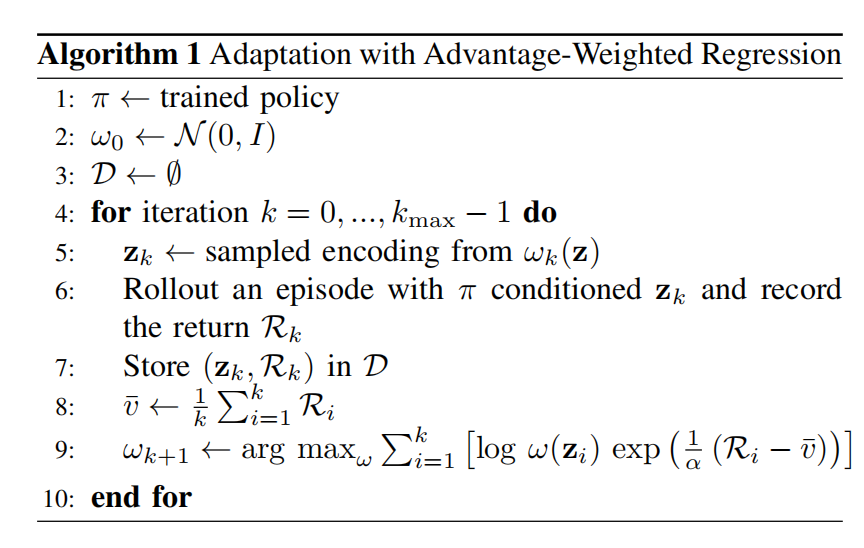
策略训练完成之后,通过AWR算法寻找到编码$\mathbf{z}^*$,其目标函数为
$$ \begin{aligned} \mathbf{z}^*=\underset{\mathbf{z}}{argmax}\mathbb{E}_{\tau\sim p^*(\tau\vert\pi,\mathbf{z})}[\sum_{t=0}^{T-1}\gamma^tr_t] \end{aligned}\tag{9} $$
具体AWR算法可见图2所示
寻找到$\mathbf{z}^*$之后,就可以部署到真实世界了。
参考文献
$[1]$ Peng X B, Coumans E, Zhang T, et al. Learning agile robotic locomotion skills by imitating animals$[J]$. arXiv preprint arXiv:2004.00784, 2020.
$[2]$ Peng X B, Abbeel P, Levine S, et al. Deepmimic: Example-guided deep reinforcement learning of physics-based character skills$[J]$. ACM Transactions On Graphics (TOG), 2018, 37(4): 1-14.
$[3]$ Yu W, Liu C K, Turk G. Policy transfer with strategy optimization$[J]$. arXiv preprint arXiv:1810.05751, 2018.
$[4]$ Alemi A A, Fischer I, Dillon J V, et al. Deep variational information bottleneck$[J]$. arXiv preprint arXiv:1612.00410, 2016.
引用方法
请参考:
li,wanye. "机器人模仿动物的方式学习敏捷技能". wyli'Blog (Jan 2024). https://www.robotech.ink/index.php/archives/58.html
或BibTex方式引用:
@online{eaiStar-58,
title={机器人模仿动物的方式学习敏捷技能},
author={li,wanye},
year={2024},
month={Jan},
url="https://www.robotech.ink/index.php/archives/58.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接