Mobile ALOHA
Mobile ALOHA是一款可移动的双臂操纵机器人,用于处理日常家务。日常的家务往往需要机器人移动能力和操纵能力协作才能完成,例如:机器人把锅放在冰箱内,机器人先要移动到冰箱前,然后打开冰箱,最后把物品放入冰箱。在打开冰箱的时候,甚至需要机器人底座倒车。然而,前人工作只是移动能力或操纵能力单方面的研究,这与现实相差很大。
虽然模仿学习在机器人操纵与运动方面均性能优越,但是有两个主要因素阻碍模仿学习应用于双臂操纵,分别是:
- 缺乏低成本的可即时使用的远程操纵硬件。
- 前人的机器人学习工作中没有在双臂移动操纵中展示出高性能,即不存在质量高的数据。
作者们开发的Mobile ALOHA拥有一个可独立运动的轮式基座,用户可通过双手控制它用于收集数据,且整体成本较低。在模仿学习方面,研究发现直接concat基座的动作与操纵臂的动作就能产生很强的表现。同时,受预训练和协同训练的启发,基于静态操纵数据集提升了模仿学习算法的表现。
Mobile ALOHA硬件
在硬件设计方面,作者们主要考虑以下四点:
- 移动性:机器人可以速度为$1.42m/s$运动
- 稳定性:即使操纵沉重的物品,仍能保持稳定
- 整体远程操纵性:机械臂和基座中所有自由度均可远程操纵
- 无约束性:自带电源和算力
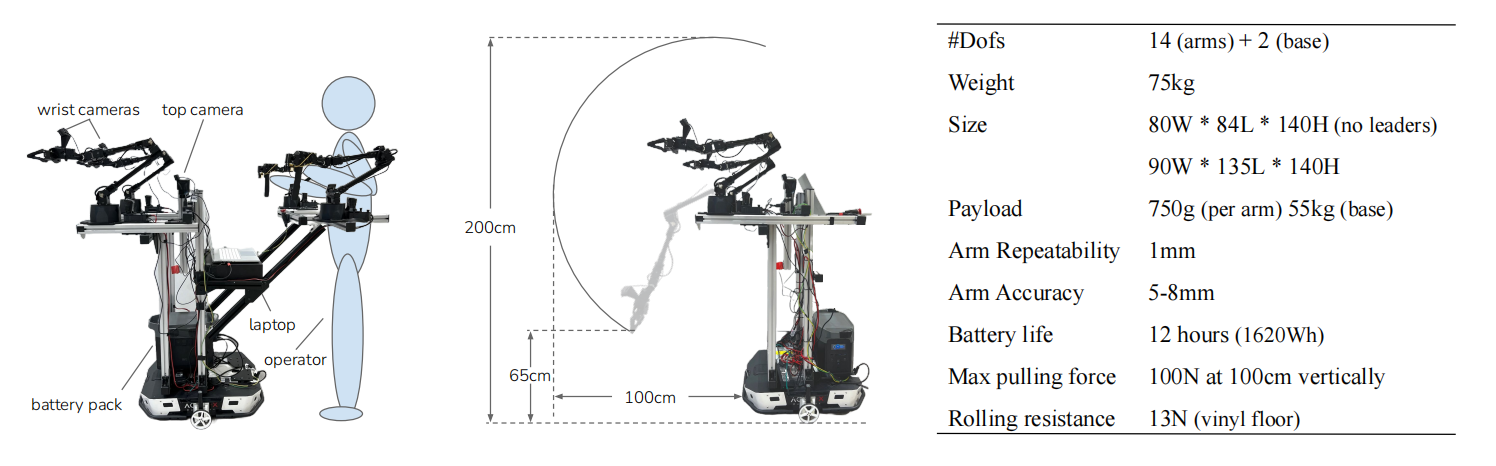
基于移动性和稳定性的考虑,选择AgileX Tracer AGV作为移动基座。基于整体远程操纵性的考虑,将操纵员的腰部与基座的底部约束以达到可用腰驱动机器人的效果,可见图2左图所示。在机器人自动驾驶执行任务时,约束结构可拆卸掉,从而提升机器人的工作空间和减轻重量。基于无约束性的考虑,在基座放置了14kg的电池,也有利于以防止倾覆。前两个机械臂的腕处装有摄像头,还有一个摄像头面向前方。四个机械臂通过USB串口与电脑通信,基座通过CAN总线与电脑通信。
基于静态数据的协同训练
模仿学习典型的应用方式是依赖特定机器人平台收集给定任务数据集解决真实世界的任务。然而,这种直接的方式需要人类操纵员从零开始收集每个任务的数据,这是很费时间的。最近,基于来自相似机器人多样数据的联合训练表现出了有前景的成果。
ALOHA的静态数据来源于两个彼此相对的机械臂在桌面上执行任务收集得到。与Mobile ALOHA相比,ALOHA无移动底座,也没有两臂之间的摄像头,且两臂彼此相对。若利用ALOHA数据集和Mobile ALOHA移动数据集做联合训练,那么目标函数可设定为
$$ \begin{equation} \mathbb{E}_{(o^i,a^i_{arms},a^i_{base})\sim D^{m}_{mobile}}[L(a^i_{arms},a^i_{base},\pi^m(o^i))]+\mathbb{E}_{(o^i,a^i_{arms})\sim D_{static}}[L(a^i_{arms},[0,0],\pi^m(o^i))]\tag{1} \end{equation} $$
式(1)中$m$指的是特定任务,$a_{base}^i$分别指基座的线速度和角速度。该款机器人中机械臂共有14个自由度,基座有2个自由度,共计16个自由度。
值得一提的是:Mobile ALOHA分别基于ACT、扩散策略、以及VINN三种模仿学习方法联合训练,用于研究。
局限性
尽管Mobile ALOHA性能优越,但是仍存在局限性。在硬件方面,他的占有面积可进一步减少,以提高其灵活性;由于机械臂的高度是固定的,那么放置位置低的冰箱、微波炉等处理起来很有挑战,可增加一个高度的自由度以处理该问题。
引用方法
请参考:
li,wanye. "Mobile ALOHA". wyli'Blog (Jan 2024). https://www.robotech.ink/index.php/archives/68.html
或BibTex方式引用:
@online{eaiStar-68,
title={Mobile ALOHA},
author={li,wanye},
year={2024},
month={Jan},
url="https://www.robotech.ink/index.php/archives/68.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接