扩散策略:通过动作扩散进行的视觉运动策略学习
基于演示的策略学习是学习观测到动作映射的监督学习任务。然而,现实中机器人动作具有多峰分布、序列相关、以及高精度要求的特点,与其它监督学习任务相比具有很大的挑战。扩散策略是一个新形式的机器人视觉运动策略。与直接预测动作不同,它以视觉观测为条件推断动作-分数的梯度。这种方式学习到的策略继承了扩散模型许多关键特性:
- 表达多峰的动作分布:通过学习动作分数函数的梯度和在梯度域上执行随机朗之万采样,扩散策略可以表达任意标准化的分布。
- 高维输出空间:正如极具表达性的图片生成结果展示的,扩散模型对高维空间展现出杰出的扩展能力。这种特性使策略可以推断出未来动作的一个序列。这对于鼓励时序动作的连续性与避免短视规划很重要。
- 稳定训练:训练基于能量的策略常常需要负采样,用于估计很难估计的正则化常数,这会造成训练的不稳定性。扩散策略绕过了学习能量函数梯度的需要,因此实现了稳定训练。
扩散策略
去噪扩散概率模型
DDPMs被称为去噪扩散概率模型,在图像领域作为生成模型,其输出被建模为去噪过程,常称为随机朗之万动力学。去噪过程可表达为
$$ \begin{aligned} \mathbf{x}^{k-1}=\alpha(\mathbf{x}^k-\gamma\xi_{\theta}(\mathbf{x}^k,k))+\mathcal{N}(0,\sigma^2\mathbf{I}) \end{aligned}\tag{1} $$
式(1)中$\xi_{\theta}$为参数$\theta$下噪音预测网络。
根据式(1),可知,去噪过程为:从高斯噪音采样得到$\mathbf{x}^K$开始,执行$K$次去噪迭代,产生一系列中间动作$\mathbf{x}^k,\mathbf{x}^{k-1},\ldots,\mathbf{x}^0$,直到期望的无噪音输出$\mathbf{x}^0$得到。
公式(1)也可以被理解为噪音梯度下降:
$$ \begin{aligned} \mathbf{x}'=\mathbf{x}-\gamma\nabla E(\mathbf{x}) \end{aligned}\tag{2} $$
噪音预测网络$\xi_{\theta}(\mathbf{x},k)$有效的预测了梯度$\nabla E(\mathbf{x})$,$\gamma$为学习率。
DDPM训练
去噪扩散概率模型的训练过程为:从数据集中随机采样得到样本$\mathbf{x}^0$;对于每个样本,随机(通常为均匀分布)选择第$k$次迭代,再从第$k$次迭代的高斯分布中采样噪音$\xi^k$,然后基于MSE损失函数训练噪音预测网络。
$$ \begin{aligned} L=MSE(\xi^k,\xi_{\theta}(\mathbf{x}^0+\xi^k,k)) \end{aligned}\tag{3} $$
其中,第$k$次迭代的高斯分布的方差需要满足一定的计算关系,具体可见DDPMs相关论文。
视觉运动策略学习的扩散
在把DDPM用于学习机器人视觉运动策略的过程中,需要修改两个方面,分别是:
- 输出$\mathbf{x}$用于表示机器人动作
- 以观测$\mathbf{O}_t$为输入条件进行去噪
闭环动作序列预测
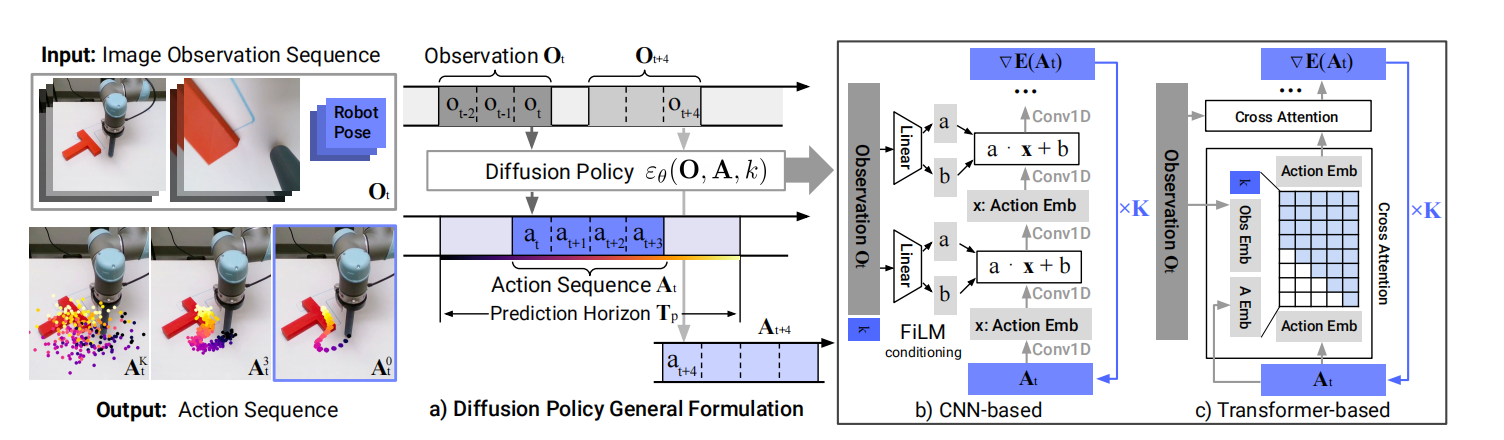
一个有效的动作函数应该鼓励时序连续性和长期规划平滑性,也能够允许对数据分布之外的观测作出及时响应。为了实现该目标,利用回退窗口控制对扩散模型产生的动作序列进行动作的执行。更确切的说:在时间步$t$,策略基于最近$T_0$个的观测数据$O_t$作为输入,预测出$T_p$个动作。其中,$T_a$个动作用于执行。通过只执行$T_a$个动作,从而使策略实现执行的时序连续性、平滑性,且也能及时响应变化。简单来说,只执行中间的一部分片段。模型的输入与输出可见图1.a所示。
注:这种闭环方式作用是有限的,只是使策略意识到了反馈而已,不是完全的反馈。这种动作序列的预测,有时序连续性和空闲动作鲁棒性的优势。同时,模型预测位置,相较于预测速度,更能应对复合误差,且基于位置控制的模式更能表现动作的多峰分布。在ACT算法实践过程中,发现,动作序列的预测并不会对空闲动作有较强的鲁棒性,可能是该算法表达力不足的原因。
基于回退窗口控制的动作执行效果,可见图2所示。

根据图2可知,在给定状态下,末端执行器可以从左边或右边推动block。扩散策略两种策略都学习到了,且在每个回合只执行一种策略。然而,LSTM-GMM和IBC偏向于一种模式;BeT由于缺乏时序依赖性在一个回合中无法执行任何一个策略。
视觉观测为条件
若以视觉观测为条件预测动作,那么式(1)可变为
$$ \begin{aligned} \mathbf{A}_t^{k-1}=\alpha(\mathbf{A}_t^k-\gamma\xi_{\theta}(\mathbf{O}_t,\mathbf{A}_t,k)+\mathcal{N}(0,\sigma^2I)) \end{aligned}\tag{4} $$
式(3)变为
$$ \begin{aligned} L=MSE(\xi^k,\xi_{\theta}(\mathbf{O}_t,\mathbf{A}_t^0+\xi^k,k)) \end{aligned}\tag{5} $$
从去噪过程的输出中排出掉观测显著提升了推理速度,且更好地容纳实时控制。
重要的设计决策
网络架构的选择
对于网络架构,作者们给出了两种,分别是基于CNN的扩散策略架构和基于Transformer的扩散策略架构。
对于基于CNN的扩散策略架构,作者们在Diffuser中U-Net网络架构基础上进行了一些改进:
- 以FiLM编码后的观测Embedding和去噪迭代数$k$为条件,生成动作,可见图3.b所示。
- 只预测动作轨迹,而不是预测观测和动作的联合轨迹。
- 由于回退预测窗口的不兼容性,移除基于inpainting的目标状态。
为了减少CNN模型过平滑的效果,引入了BeT中Transformer架构,被称为基于Transformer的DDPM。该模型把共享MLP编码之后的观测$\mathbf{O}_t$Embedding、带有噪音的动作$A_t^k$、以及扩散迭代次序$k$输入到Transformer的解码器中预测“梯度”$\xi_{\theta}(\mathbf{O}_t,\mathbf{A}_t^k,k)$。其中,扩散迭代序列次序$k$为第一个token。
对两个模型的选择,作者们建议先尝试基于CNN的扩散模型。若效果不好,再尝试基于Transformer的模型。根据作者们的实践经验,在任务复杂性或动作变化频率较高的任务上,CNN的效果会差。
确切的说,基于CNN的网络架构本质上是时序卷积,该网络架构有利于每步噪音预测不仅取决于过去时间步,也取决于未来时间步,从而捕获局部时序关系,最终也能保证整体的时序一致性。同时,U-Net网络架构可使输出不仅取决于网络架构,也取决于输入,可使输入与输出一致。与U-Net相比,Transformer网络架构每步的噪音预测只关注过去的信息,主要是为了解决CNN过平滑的问题。
视觉编码
每张图片被ResNet-18编码为embedding,与之前时间步的编码concat到一起,得到最终的观测。同时,也对编码器进行了如下修改:
- 利用空间softmax池化替换全局平均池化。
- 利用GroupNorm替换BatchNorm。
噪音调度
$\sigma,\alpha,\gamma$,以及高斯噪音$\xi^k$均为$k$的函数,这种方式被称为噪音调度。它控制着扩散策略捕获动作的高频和低频特性。作者们,发现,iDDPM中平方余弦调度效果最好。
模型推理
在推理阶段,推理速度对实现实时控制非常重要。其中,DDIM中作者们通过解耦合训练与推理时去噪的次数,从而提高模型的推理速度。这种方式在扩散策略中也同样适用。
相关思考
本质上,扩散策略是利用扩散模型预测一系列的连续动作,这种数据与生成的图片数据相似。然而,两者之间也存在不同点,动作数据拥有非线性动力学、高频变化、以及不稳定数值范围的特点。其中,不稳定数值范围是指不同形态的机器人的动作取值范围是不同的。
引用方法
请参考:
li,wanye. "扩散策略:通过动作扩散进行的视觉运动策略学习". wyli'Blog (Jan 2024). https://www.robotech.ink/index.php/archives/106.html
或BibTex方式引用:
@online{eaiStar-106,
title={扩散策略:通过动作扩散进行的视觉运动策略学习},
author={li,wanye},
year={2024},
month={Jan},
url="https://www.robotech.ink/index.php/archives/106.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接