CQL:保守型Q-learning
为了解决由智能体学到的策略$\pi$与数据产生的行为策略$\pi_{\beta}$之间分布偏移产生的价值高估问题,CQL算法学习出保守型Q函数,使Q函数的期望值为策略$\pi$下价值函数$V(s)$真实值的下界。在理论上,证明了CQL的确产生了价值函数$V(s)$真实值的下界,且该算法可应用到策略学习迭代步骤中。
为了公式的简洁性,利用$\mathcal{B}^*Q(s,a)$表示贝尔曼最优运算,可见式(1)
$$ \mathcal{B}^*Q(s,a)=r(s,a)+\gamma\mathbb{E}_{{s}'\sim P({s}'|s,a)}[max_{{a}'}Q({s}',{a}')]\tag{1} $$
利用$\mathcal{B}^{\pi}Q$表示策略$\pi$下的贝尔曼运算,可见式(2)
$$ \mathcal{B}^{\pi}Q=r + \gamma \mathbb{E}_{{s}'\sim T({s}'\vert s,a),{a}'\sim\pi({a}'\vert{s}')}Q({s}',{a}')\tag{2} $$
同时,在CQL中行为策略$\pi_{\beta}$为数据统计的结果,计算公式为$\hat{\pi}_{\beta}:=\frac{\sum_{s,a\in\mathcal{D}}1[s=s,a=a]}{\sum_{s\in\mathcal{D}}1[s=s]}$
Conservative Off-Policy Evaluation
CQL主要考虑的是防止策略$\pi$下价值函数$V^{\pi}(s,a)$的高估问题。因此,在最小化贝尔曼误差的同时,也最小化$Q(s,a)$的值,可见式(3)。
$$ \begin{equation} \hat{Q}^{k+1}\leftarrow \underset{Q}{argmin}\quad\alpha\mathbb{E}_{s\sim\mathcal{D},a\sim{\mu(s,a)}}[Q(s,a)]+\frac{1}{2}\mathbb{E}_{s,a\sim\mathcal{D}}[(Q(s,a)-\hat{\mathcal{B}}^{\pi}\hat{Q}^k(s,a))^2]\tag{3} \end{equation} $$
由于标准的$Q(s,a)$函数的训练,不会查询未观测过的状态,但会查询未观测过的动作。所以,限制$\mu$与数据集中状态边缘分布匹配,以便于$\mu(s,a)=d^{\pi_{\beta}}(s)\mu(a\vert s)$成立。其中,$d^{\pi_{\beta}}(s)$为策略$\pi_{\beta}$下的状态$s$的折扣边缘分布。具体的限制方法,可见下文。
文献$[2]$表明,对于$\forall(s,a)$,$\hat{Q}^{\pi}:=lim_{k\to\infty}\hat{Q}(k)$为$Q^{\pi}$的下界。然而,CQL更关注的是价值函数$V^{\pi}(s)$的估计,那么可进一步加紧下界。为了使策略$\pi(a|s)$下$\hat{Q}(\pi)$的期望值为$V^{\pi}$的下界,文献$[2]$引入数据集的策略$\pi_{\beta}(a\vert s)$下的$Q$函数最大化项,可见式(4)。
$$ \begin{aligned} \hat{Q}^{k+1}\leftarrow \underset{Q}{argmin}\quad \alpha(\mathbb{E}_{s\sim\mathcal{D},a\sim\mu(a\vert s)}[Q(s,a)]-\mathbb{E}_{s\sim\mathcal{D},a\sim\hat{\pi}_{\beta}(s,a)}[Q(s,a)]) \\ +\frac{1}{2}\mathbb{E}_{s,a,{s}'\sim\mathcal{D}}[(Q(s,a)-\hat{\mathcal{B}}^{\pi}\hat{Q}^k(s,a))^2] \end{aligned}\tag{4} $$
根据文献$[2]$中理论,可知,由式(4)产生的$\hat{Q}^{\pi}$不一定能够对于$\forall(s,a)$均为$Q^{\pi}$的下界。但是,$\hat{Q}^{\pi}$的均值一定为价值函数$V^{\pi}$的下界,可以理解为:若$\mu(a\vert s)=\pi(a\vert s)$成立,则$\mathbb{E}_{\pi(a\vert s)}[\hat{Q}^{\pi}(s,a)]\le V^{\pi}(s)$。
直觉上来说,式(4)中最大化策略$\hat{\pi}_{\beta}$下的$Q$值,那么策略$\hat{\pi}_{\beta}$下动作的$Q$值最可能被高估,即数据集中出现过的动作才有可能会被高估,因此$\hat{Q}^{\pi}$处处小于$Q^{\pi}$未必成立。
Conservative Q-Learning算法
根据文献$[2]$,可知,求解式(6)可得策略$\pi$价值的下界,那么就会降低策略高估的风险。因此,若利用式(6)作为策略的评估可得$\hat{Q}^{\pi}$,然后再进行一步的策略提升,那么就可得$V^{\pi}$的下界。然而,这种计算成本很高。另一种方法是使$u(\mathbf{a}\vert\mathbf{s})$近似策略$\hat{\pi}^k$,该策略$\hat{\pi}^k$是通过最大化当前迭代$Q$函数获得的,这种方式更接近线上强化学习,可见式(5)。这类优化问题的实例可被称为$CQL(\mathcal{R})$。
$$ \begin{aligned} \underset{Q}{min}\underset{\mu}{max}\quad\alpha(\mathbb{E}_{s\sim\mathcal{D},a\sim\mu(a\vert s)}[Q(s,a)]-\mathbb{E}_{s\sim\mathcal{D},a\sim\hat{\pi}_{\beta}(a\vert s)}[Q(s,a)]) \\ +\frac{1}{2}\mathbb{E}_{s,a,{s}'\sim\mathcal{D}}[(Q(s,a)-\hat{\mathcal{B}}^{\pi_k}\hat{Q}^k(s,a))^2]+\mathcal{R}(\mu) \end{aligned}\tag{5} $$
式(5)中$\mathcal{R}(\mu)$为正则化器。
CQL的变体: 若利用先验分布为均匀分布的$\rho(a\vert s)$与策略$\mu$之间KL-Divergence距离作为正则化器$\mathcal{R}(\mu)$,那么$CQL(\mathcal{R})$可被实例化为式(6)。其中,$\mu(\mathbf{a}\vert\mathbf{s})$正比于$\rho(\mathbf{a}\vert\mathbf{s})\cdot exp(Q(\mathbf{s},\mathbf{a}))$
$$ \begin{equation} \underset{Q}{min}\quad\alpha\mathbb{E}_{s\sim\mathcal{D}}[log\sum_a exp(Q(s,a))-\mathbb{E}_{a\sim\hat{\pi}_{\beta}(a\vert s)}[Q(s,a)]]+\frac{1}{2}\mathbb{E}_{s,a,{s}'\sim\mathcal{D}}[(Q-\hat{\mathcal{B}}^{\pi_k}\hat{Q}^k)^2]\tag{6} \end{equation} $$
若先验分布为之前策略$\hat{\pi}^{k-1}$,那么式(8)中第一项应该被替换为策略$\hat{\pi}^{k-1}(a\vert s)$下Q值的指数权重平均。
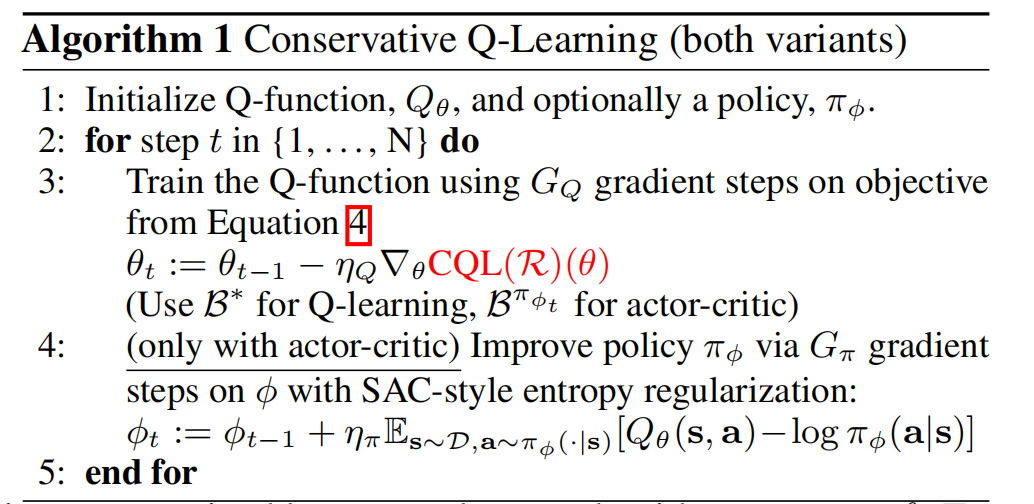
图1中式(2)为本文中式(6)。
参考文献
$[1]$ Prudencio R F, Maximo M R O A, Colombini E L. A survey on offline reinforcement learning: Taxonomy, review, and open problems$[J]$. IEEE Transactions on Neural Networks and Learning Systems, 2023.
$[2]$ Kumar A, Zhou A, Tucker G, et al. Conservative q-learning for offline reinforcement learning$[J]$. Advances in Neural Information Processing Systems, 2020, 33: 1179-1191.
引用方法
请参考:
li,wanye. "CQL:保守型Q-learning". wyli'Blog (Jan 2024). https://www.robotech.ink/index.php/archives/120.html
或BibTex方式引用:
@online{eaiStar-120,
title={CQL:保守型Q-learning},
author={li,wanye},
year={2024},
month={Jan},
url="https://www.robotech.ink/index.php/archives/120.html"
}
CC版权: 本篇博文采用《CC 协议》,转载必须注明作者和本文链接